















经验分享 | DMA助力实时控制

先楫产品中,有大量支持DMA的设备,其中USB、Ethernet、ADC、DAC等有自己的内部DMA,AHB和AXI总线上还有公共的DMA设备——HDMA、XDMA。
直接存储器访问(DMA,Direct Memory Access)的优点
· 提高系统效率:通过绕过CPU,DMA显著减少了数据传输对CPU资源的占用,使得CPU能够专注于其他计算任务,提升了系统整体的响应速度和处理能力。
· 加快数据传输速度:针对多总线高性能MCU,DMA可以避免不同总线同步问题,提供更高的数据传输速率。
· 降低系统延迟:由于减少了CPU参与数据搬运的环节,系统延迟显著降低,这对于实时系统和高性能计算应用至关重要,确保了数据的即时处理和反馈。
· 简化软件设计:DMA控制器的硬件自动化处理降低了软件层面对数据传输的复杂管理,使得软件设计更为简洁,降低了开发难度和维护成本。
先楫产品中,有大量支持DMA的设备,其中USB、Ethernet、ADC、DAC等有自己的内部DMA,AHB和AXI总线上还有公共的DMA设备——HDMA、XDMA。
HDMA、XDMA都是多通道DMA,可以通过DMAMUX实现多通道的数据传输。
HDMA、XDMA分别接入AHB和AXI总线,在总线内部传输效率更高,可以支持8-64bit数据宽度的传输。
本文将通过两个应用案例,说明DMA在如何在实时控制中提高系统的稳定性和实时性。

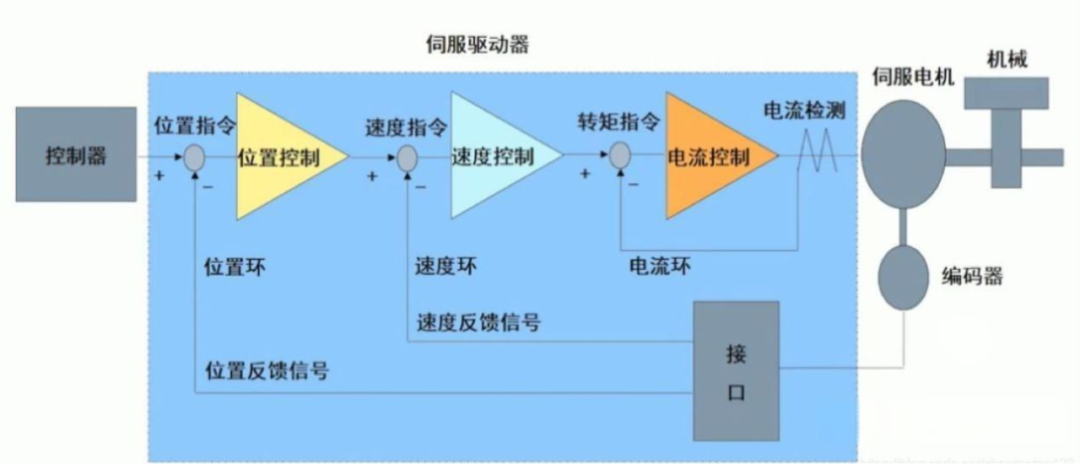
下图是典型伺服三环的控制框图,其中编码器是控制的关键反馈,除了准确读取位置之外,还需要通过不同时刻读取位置计算转速。读取位置的时刻在伺服闭环中占非常关键的作用。
HPMICRO
常见位置读取方式是在定时中断中读取位置,确保读取间隔时刻一致。但由于软件响应时间不确定,读取间隔很难保证一致。
本文通过DMA+链表方式实现HPM6200用串口与多摩川编码器定时通讯的方式。多摩川编码器通讯协议见下图:
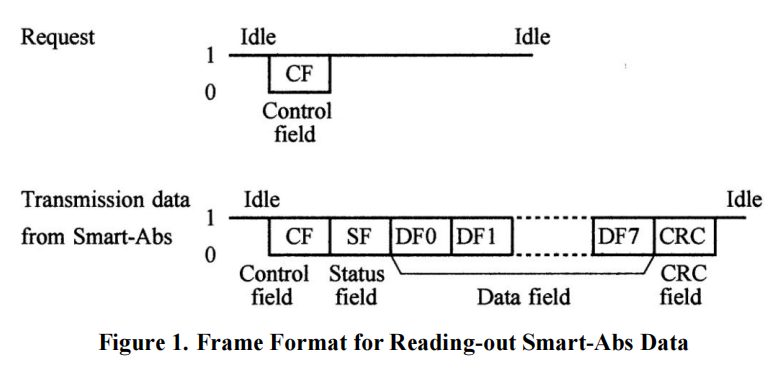
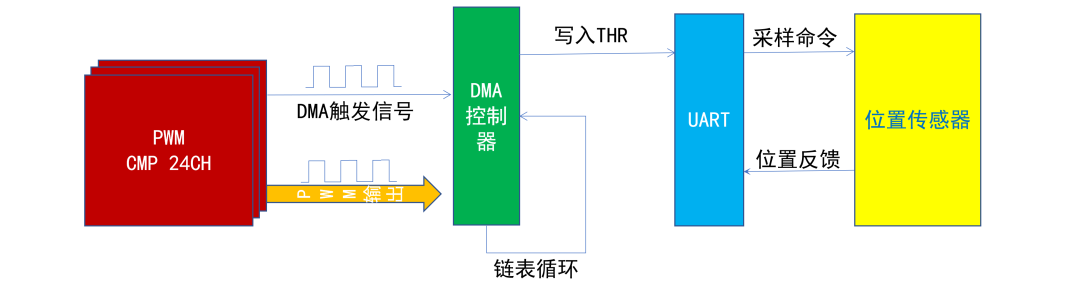
例程通过PWM定期触发DMA,由DMA启动串口读取动作。DMA动作完成后利用链式传输,可以在处理器不介入的情况下,连续完成多个不同配置的传输任务。
HPMICRO
程序中使用了PWM、DMA、UART三个模块
· PWM负责定时输出DMA触发信号;
· DMA接收触发信号后将采样命令写入UART的THR寄存器;
· UART负责收发位置传感器信息,其中接收建议使用硬件idle+FIFO模式。
先楫的UART有硬件收发使能控制,只需要DE设置为有效,485通讯可以自动实现收发方向控制,无须CPU干预。
HPMICRO
HPM6280集成了9个UART模块:
除了常规配置之外,还支持硬件空闲中断
支持16 字节的 TXFIFO 和 RXFIFO
硬件收发使能自动控制
通过简单配置即可实现2.5Mbps通讯、RS485自动收发使能控制、硬件空闲中断接收数据等功能。
void config_uart(void){ hpm_stat_t stat; uart_config_t config = {0}; /* if TEST_UART is same as BOARD_CONSOLE_BASE, it has been initialized in board_init(); */ uart_default_config(HPM_UART7, &config); config.baudrate = 2500000UL; config.fifo_enable = true; //config.dma_enable = true; clock_set_source_divider(clock_uart7, clk_src_pll0_clk0, 5);//80Mhz clock_add_to_group(clock_uart7, 0); config.src_freq_in_hz = clock_get_frequency(clock_uart7);//clock_get_frequency(clock_uart0); config.rx_fifo_level = uart_rx_fifo_trg_gt_three_quarters;/* this config should not change *///uart_rx_fifo_trg_not_empty; config.rxidle_config.detect_enable = true; config.rxidle_config.detect_irq_enable = true; config.rxidle_config.idle_cond = uart_rxline_idle_cond_rxline_logic_one; config.rxidle_config.threshold = 20U; /* 20bit */ stat = uart_init(HPM_UART7, &config); if (stat != status_success) { printf("failed to initialize uart\n"); } //uart_enable_irq(HPM_UART0, uart_intr_rx_data_avail_or_timeout); intc_m_enable_irq_with_priority(IRQn_UART7, 1);}(可滑动查看)
HPMICRO
下面DMA配置启用了链式传输,实现DMA循环触发UART读取位置信息。
构建两个相互链接的 DMA 任务描述符列表。DMA控制器会在完成当前任务描述符的相应任务后,从 ChnLLPointer指向地址取下一个任务描述符。下一个任务描述符又关联当前描述符,如此互锁,无限循环。
描述符中DMA配置目标数据为握手模式,UART设备返回接收数据完毕信号。
为确保uart数据可以准确传输,DMA的高优先级标志位要设置为1。
{ hpm_stat_t stat; dma_channel_config_t rx_ch_config = { 0 }; dmamux_config(HPM_DMAMUX, ch_num, HPM_DMA_SRC_MOT0_0, true); /* 1.1 config chain deors */ dma_default_channel_config(HPM_HDMA, &rx_ch_config); rx_ch_config.src_addr = src; rx_ch_config.src_width = DMA_TRANSFER_WIDTH_BYTE; /* In DMA handshake case, source width and destination width must be BYTE. */ rx_ch_config.src_addr_ctrl = DMA_ADDRESS_CONTROL_INCREMENT; rx_ch_config.src_mode = DMA_HANDSHAKE_MODE_NORMAL; rx_ch_config.dst_addr = (uint32_t)&uart_ptr->THR; rx_ch_config.dst_width = DMA_TRANSFER_WIDTH_BYTE; /* In DMA handshake case, source width and destination width must be BYTE. */ rx_ch_config.dst_addr_ctrl = DMA_ADDRESS_CONTROL_FIXED; rx_ch_config.dst_mode = DMA_HANDSHAKE_MODE_HANDSHAKE; rx_ch_config.size_in_byte = 1; rx_ch_config.priority = 1; rx_ch_config.src_burst_size = DMA_NUM_TRANSFER_PER_BURST_1T; /* In DMA handshake case, source burst size must be 1 transfer, that is 0. */ rx_ch_config.linked_ptr = core_local_mem_to_sys_address(HPM_CORE0, (uint32_t)&deors[1]);//link to next dma action stat = dma_config_linked_deor(HPM_HDMA, &deors[0], ch_num, &rx_ch_config); if (stat != status_success) { while (1) { }; } rx_ch_config.linked_ptr = core_local_mem_to_sys_address(HPM_CORE0, (uint32_t)&deors[0]); stat = dma_config_linked_deor(HPM_HDMA, &deors[1], ch_num, &rx_ch_config); if (stat != status_success) { while (1) { }; }(可滑动查看)
HPMICRO
在PWM中配置DMA定期触发,配置比较器匹配触发,配置DMA输出使能。
互联管理器TRGM是HPM MCU中非常有特色的外设,可以通过配置实现多个外设的输入输出相互连接,使得多个外设可以相互配合使用。
HPM6200中TRGM支持4个DMA 请求输出,用户可以配置TRGM,从多个DMA请求输入中,选择4个连接到 DMAMUX。本文选择了PWM0的CMP14。
pwm_set_reload(HPM_PWM0, 0, reload); pwm_set_start_count(HPM_PWM0, 0, 0); pwm_set_load_counter_shadow_register_trigger(HPM_PWM0,pwm_shadow_register_update_on_modify,0); /* * config cmp1 and cmp2 */ cmp_config[0].mode = pwm_cmp_mode_output_compare; cmp_config[0].cmp = reload + 1; cmp_config[0].update_trigger = pwm_shadow_register_update_on_hw_event; cmp_config[1].mode = pwm_cmp_mode_output_compare; cmp_config[1].cmp = reload + 1; cmp_config[1].update_trigger = pwm_shadow_register_update_on_hw_event; cmp_config[2].mode = pwm_cmp_mode_output_compare;//channel to update compare shadow cmp_config[2].cmp = reload; cmp_config[2].update_trigger = pwm_shadow_register_update_on_modify; cmp_config[3].mode = pwm_cmp_mode_output_compare;//dma trigger channel cmp_config[3].cmp = reload-100; cmp_config[3].update_trigger = pwm_shadow_register_update_on_modify; pwm_get_default_pwm_pair_config(HPM_PWM0, &pwm_pair_config); pwm_pair_config.pwm[0].enable_output = true; pwm_pair_config.pwm[0].dead_zone_in_half_cycle = 8000; pwm_pair_config.pwm[0].invert_output = false; pwm_pair_config.pwm[1].enable_output = true; pwm_pair_config.pwm[1].dead_zone_in_half_cycle = 16000; pwm_pair_config.pwm[1].invert_output = false; /* * config pwm */ if (status_success != pwm_setup_waveform_in_pair(HPM_PWM0, 0, &pwm_pair_config, cmp_index, cmp_config, 2)) { printf("failed to setup waveform\n"); while(1); } //====================set dma trriger from cmp[14]============================ pwm_config_cmp(HPM_PWM0, 14, &cmp_config[3]);//dma trigger pwm_enable_dma_request(HPM_PWM0,1<<14);//enable pwm signal output to dma trgm_dma_request_config(HPM_TRGM0,0,14);//connect cmp14 to HPM_DMA_SRC_MOT0_0(可滑动查看)
HPMICRO
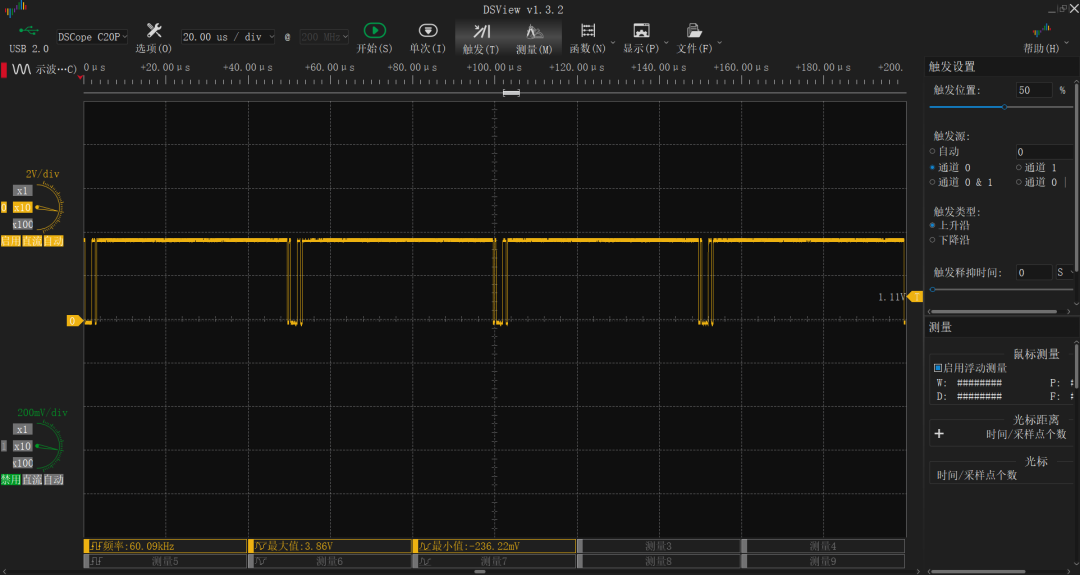
下图是DMA以20kHz触发UART定期输出的波形,定期输出0X1A,读取多摩川传感器中全部信息。
HPM5300、HPM6800、HPM6E00引入了DMAv2,增加了无限循环、DMA传输一半中断,并修改了burst传输长度定义。
下文将列举一个buck-boost电源应用通过DMAv2更新PWM的例子,演示DMA加速传输的方法和效果。
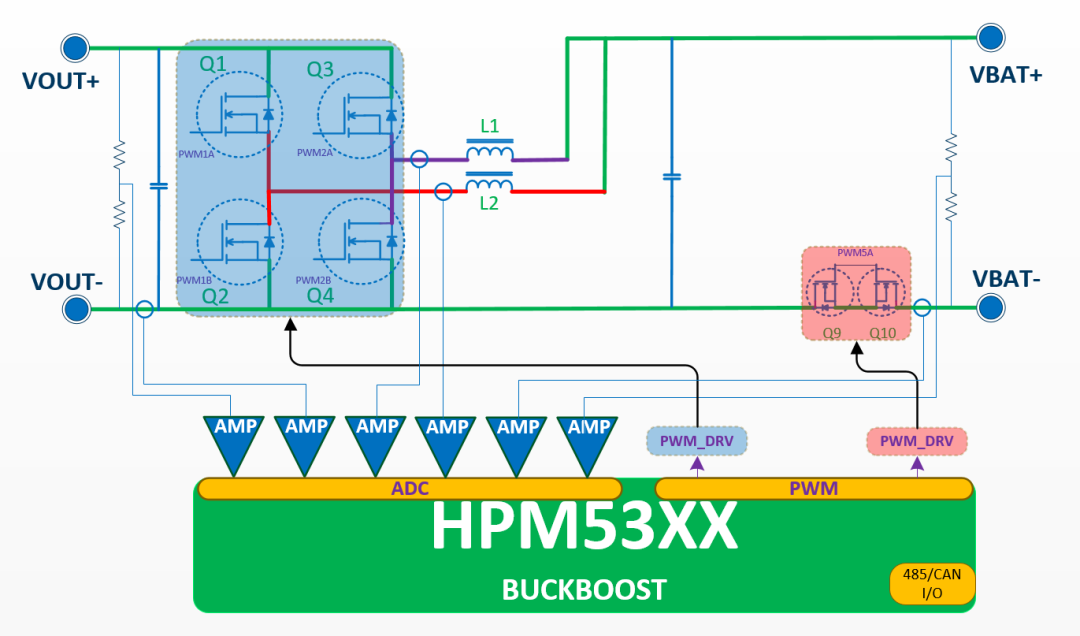
例程选用了两路交错buck-boost电路。
高效电源对功率密度有更高的要求,更高的开关频率可以降低主回路中电感和电容体积,实际应用中,中小功率的电源开关频率可达100khz以上,频繁的调节对CPU的运算能力和读写外设的速度有更高的要求。
HPM5300单次写PWM寄存器至少需要5个AHB时钟(HPM6700、HPM6300时间更长),例程使用了8个PWM比较寄存器,CPU时钟为480Mhz、AHB总线为160Mhz,连续写入时至少0.25us,相当于120条CPU clock。
修改PWM刷新方式后,将PWM比较器寄存器的值放入DLM内存中,更新PWM只是占用了CPU 8个访问高速RAM的时间。
HPMICRO
与HPM6200不同,DMAv2直接支持无限循环模式,CHCTRL[CTRL].INFINITELOOP设置为1即可,不需要链表实现无限循环。
将CHCTRL[CTRL].burst_opt配置为1,burst传输个数不再是2的指数次方,可以根据实际需要配置。
PWM配置需要清零SHLK[SHLK],影子寄存器锁定功能。
其它设置与前文配置相同。
void dma_transfer_config(uint8_t DMA_chn, uint8_t PWM_num, uint32_t* CMP0){ //---------------configure dma channel----------------- dma_channel_config_t ch_config = {0}; DMA_chn &= 0x1F; dma_disable_channel(HPM_HDMA, DMA_chn);//stop channel dmamux_config(HPM_DMAMUX, DMA_chn, HPM_DMA_SRC_MOT_0, true);//trigger source is from trgms dmacfg0 //dma_reset(APP_GPTMR_DMA); //---------------configure dma chn0----------------- dma_default_channel_config(HPM_HDMA, &ch_config); ch_config.src_addr = core_local_mem_to_sys_address(HPM_CORE0, (uint32_t)&PWM_DMA_struct);//source address //ch_config.dst_addr = (uint32_t)&HPM_PWM0->CMP[0];//destination address ch_config.dst_addr = (uint32_t)CMP0;//destination address ch_config.src_mode = DMA_HANDSHAKE_MODE_HANDSHAKE;//hand shake mode waiting trigger signal ch_config.src_width = DMA_TRANSFER_WIDTH_WORD;// 32bit ch_config.src_addr_ctrl = DMA_ADDRESS_CONTROL_INCREMENT; ch_config.burst_opt = DMA_SRC_BURST_OPT_CUSTOM_SIZE;//burst size is actural number rather than 2^num ch_config.src_burst_size = PWM_num; ch_config.dst_width = DMA_TRANSFER_WIDTH_WORD;//32bit ch_config.dst_addr_ctrl = DMA_ADDRESS_CONTROL_INCREMENT; ch_config.dst_mode = DMA_HANDSHAKE_MODE_NORMAL;//normal ch_config.en_infiniteloop = true;//dma will react if transize has been completed ch_config.size_in_byte = PWM_num*4; ch_config.linked_ptr = 0;//no link if (status_success != dma_setup_channel(HPM_HDMA, DMA_chn, &ch_config, true)) { printf(" dma setup channel failed\n"); return; }}(可滑动查看)

HPM系列MCU包含了强大互联管理器和DMA模块,可以轻松实现外设无限循环的触发DMA,不需要占用CPU时间每次配置DMA触发外设。
DMA直接触发外设动作,将极大提高系统动作的一致性。伺服客户对比之前中断触发读取位置与DMA触发读取位置效果:在2000rpm时,中断触发读取位置得到的计算最大瞬时转速波动为20rpm,改为DMA触发后波动降为2rpm。
微逆应用中,同时变频、变占空比时,通过DMA定时修改PWM比较器和周期寄存器数值消除了同时修改后造成的波形偶发异常问题。
电源应用中,开关频率往往超过100kHz,对CPU的利用率要求更高,且对PWM、ACMP读写频率和内容更多,DMA读写可以有限减轻CPU负担,提高CPU效率。
-END-

“先楫半导体”(HPMicro)是一家致力于高性能嵌入式解决方案的半导体公司,总部位于上海,产品覆盖微控制器、微处理器和周边芯片,以及配套的开发工具和生态系统。公司成立于2020年6月,总部坐落于上海市浦东软件园区,并在天津、苏州、深圳和杭州均设立分公司。核心团队来自世界知名半导体公司管理团队,具有15年以上,超过20个SoC的丰富的研发及管理经验。先楫半导体以产品质量为本,所有产品均通过严格的可靠性测试。目前已经量产的高性能通用MCU产品包含HPM6700/6400、HPM6300、HPM6200、HPM5300、HPM6800及HPM6E00系列,性能领先国际同类产品并通过AEC-Q100认证。公司已完成ISO9001质量管理认证和ISO 26262/IEC61508功能安全管理体系双认证,全力服务中国乃至全球的工业、汽车和能源市场。更多信息,敬请访问 https://hpmicro.com/
